SciMingo helpt onderzoekers het juiste evenwicht te vinden tussen complexiteit en begrijpelijkheid in wetenschapscommunicatie. Zo leren we je hoe je mensen aanspreekt zonder afbreuk te doen aan je onderzoek. Als volleerde flamingo's, meesters in evenwicht 🦩
Gabriël Van de Velde, finalist Agoriaprijs 2016
Artikel
Ook de ontknoping van de Agoriaprijs 2016 staat op het programma tijdens de uitreiking van de Vlaamse Scriptieprijs op 20 december. Drie finalisten zijn in de running. Vandaag stellen we Gabriël Van de Velde, master in de Robotica - Mechatronics (VUB), aan u voor.
Scriptie: "Design and control of a Robotic Mouth"
Ik doctoreer nu in de rotordynamica, waar ik een alternatieve methode bestudeer om machines die op hoge snelheid draaien (tot 60.000 tpm en meer) nog sneller te laten draaien zonder dat er problemen optreden.
De scriptie
"Sociale robots worden vandaag de dag meer en meer gebruikt. Denk maar aan de zorgsector, robotgeassisteerde-therapie, op de werkvloer en in vele andere domeinen! Deze robots worden hierdoor met de dag complexer. Daarbij is er een noodzak om de complexiteit van de communicatie te verstoppen achter een mooi, interactief en intuïtief te hanteren interface. Deze interactie dient zo goed mogelijk een gesprek tussen twee mensen te weerspiegelen."
"Om een succesvolle communicatie te garanderen moet een sociale robot de juiste tools hebben: een mooie vorm, die goed op een mens lijkt, maar ook een correcte aansturing. De aansturing is net zo cruciaal, gezien bij enige fout afkeer kan worden opgewekt of zelfs informatie verkeerd kan worden geïnterpreteerd. Hierbij is de manier van bewegen van de robot cruciaal om een gevoel van acceptatie teweeg te brengen."
"Mijn thesis begon met het naar voor brengen van een nieuw design voor de sociale robot Probo. Deze sociale robot dient als experimenteel platform om bijvoorbeeld te gebruiken bij studies met autistische kinderen, waarbij een vertrouwde en gecontroleerde omgeving kan worden opgesteld. Tijdens deze opdracht heb ik gemerkt dat ik niet zomaar van mijn robot kon verwachten dat hij de juiste expressies en spraakvormen kon uiten. Dit was een groot probleem. Dit is dan ook de reden waarom ik mij volledig heb toegespitst op het aanstuurluik van dit onderzoek."
"De resultaten die ik vond waren frappant: het calibreren van een sociale robot, met geloofwaardige en mooie expressieve vormen, gebeurt nagenoeg nog altijd manueel."
Scriptie schrijven
"Ik begon met een klein idee dat ik graag wou aftoetsen: een nieuwe manier om op iteratieve wijze een robot automatisch te laten calibreren, zonder enige menselijke tussenkomst. Tot op vandaag duurde zo'n manuele calibratie heel lang en moest deze worden herhaald bij iedere aanpassing. Om mijn ideeën in de praktijk om te zetten en te testen had ik natuurlijk een testobject nodig om te calibreren, hetgeen ik op dat moment niet had. Hierbij begon dan ook het lange avontuur."
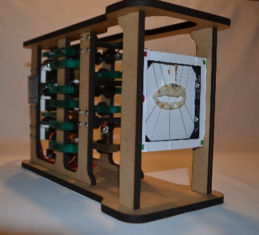
"Op iteratieve wijze heb ik zelf een robot gebouwd die enkel een mond heeft (zie foto). Het geheel werd “from scratch” opgebouwd. De opstelling heeft een mond, dat door middel van touwtjes kan worden aangestuurd met een set van motoren. Het echte werk kon toen beginnen."
Na de scriptie
"Nu de scriptie achter de rug is, ben ik aan het doctoreren. Ditmaal een compleet ander onderwerp, helemaal niet in de robotica gelegen: rotordynamica. Ik tracht een nieuw alternatieve methode te bestuderen om op hoge snelheid draaiende machines (tot 60.000 tpm en meer) nog sneller te laten draaien zonder dat deze enige problemen tegenkomen. Een hele uitdaging dus!"
"Het onderzoek met de nieuwe calibratietechniek is nog niet op zijn einde, gezien het in de nabije toekomst nog verder zal worden bestudeerd op de VUB naar een ware implementatie met een ware sociale robot."