SciMingo helpt onderzoekers het juiste evenwicht te vinden tussen complexiteit en begrijpelijkheid in wetenschapscommunicatie. Zo leren we je hoe je mensen aanspreekt zonder afbreuk te doen aan je onderzoek. Als volleerde flamingo's, meesters in evenwicht 🦩
Elektrische broek doet vallen tot het verleden behoren
Dries
Mys
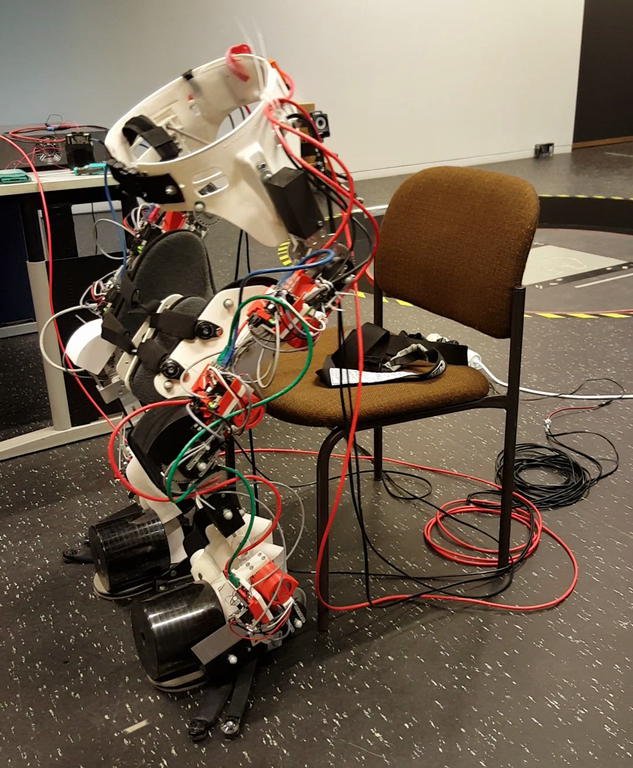
 Iedereen kent wel de elektrische fiets. De kans is zelfs reëel dat ook jij er een hebt. Deze gemotoriseerde fiets begon als een hulpje voor de oude dag, maar is nu zelfs in gebruik door jonge werknemers die per fiets zo fris als een hoentje op hun werk willen geraken. Een exoskelet is een uitwendig ijzeren skelet of robotpak dat de mens aantrekt als een elektrische broek en hem extra kracht geeft aan de heup, knie en enkel. Een exoskelet heeft het potentieel om mensen te helpen bij hun revalidatie, oudere mensen langer mobiel te houden of personen die zware arbeid verrichten te helpen op hun werk. Het exoskelet bevindt zich momenteel echter nog in zijn kinderschoenen, te vergelijken met de eerste auto's begin vorige eeuw. Net als de auto toen kent het exoskelet nu enkel een tuffende modus en moet een expert het exoskelet steeds begeleiden. Net zoals bij elke auto leveren ook de huidige commerciële exoskeletten alle kracht om vooruit te raken. In navolging van de elektrische fiets, moet ook het exoskelet de overgang maken naar een samenwerkingsmodel. Weg met het "mens stuurt aan, robot doet alles"-principe. Eendracht (tussen mens en exoskelet) maakt macht!
Iedereen kent wel de elektrische fiets. De kans is zelfs reëel dat ook jij er een hebt. Deze gemotoriseerde fiets begon als een hulpje voor de oude dag, maar is nu zelfs in gebruik door jonge werknemers die per fiets zo fris als een hoentje op hun werk willen geraken. Een exoskelet is een uitwendig ijzeren skelet of robotpak dat de mens aantrekt als een elektrische broek en hem extra kracht geeft aan de heup, knie en enkel. Een exoskelet heeft het potentieel om mensen te helpen bij hun revalidatie, oudere mensen langer mobiel te houden of personen die zware arbeid verrichten te helpen op hun werk. Het exoskelet bevindt zich momenteel echter nog in zijn kinderschoenen, te vergelijken met de eerste auto's begin vorige eeuw. Net als de auto toen kent het exoskelet nu enkel een tuffende modus en moet een expert het exoskelet steeds begeleiden. Net zoals bij elke auto leveren ook de huidige commerciële exoskeletten alle kracht om vooruit te raken. In navolging van de elektrische fiets, moet ook het exoskelet de overgang maken naar een samenwerkingsmodel. Weg met het "mens stuurt aan, robot doet alles"-principe. Eendracht (tussen mens en exoskelet) maakt macht!
Een goede samenwerking vindt altijd plaats in twee richtingen. Enerzijds moet het exoskelet de intenties van de mens goed interpreteren. Anderzijds moet de actie die het exoskelet uitvoert voor de mens voorspelbaar zijn en natuurlijk aanvoelen. Het exoskelet moet dus de mens begrijpen, maar de mens ook het exoskelet. Zoniet heeft de mens geen baat bij de geleverde assistentie. Voor een elektrische fiets is dat nog redelijk eenvoudig. Hoe harder/sneller je trapt hoe groter de assistentie is. Het exoskelet bestaat echter niet uit één motor, maar uit zes motoren die moeten samenwerken om de mens te assisteren. Het exoskelet moet daarom voorspellen welke beweging de enkels, knieën en heupen gaan maken en hierbij inschatten of de mens wil gaan zitten, een trap opgaan of gewoon wandelen. Voor revalidatie of ondersteuning van verzwakte personen is het zeer belangrijk om niet te veel assistentie te geven, zodat de persoon zelf zoveel mogelijk zijn eigen spieren traint. Het verschil tussen wat de mens zelf aankan en de totale krachten die nodig zijn om deze beweging uit te voeren, is wat het exoskelet moet leveren.
 We kunnen nog een stap verder gaan, door de mens niet alleen te assisteren, maar ook zijn evenwicht te corrigeren. Vandaag krijgen ouderen vaak het advies om te blijven bewegen, maar voorzichtig te zijn en zeker niet te vallen. Een exoskelet dat vallen voorkomt, is in staat om een actief leven te verzoenen met voorzichtigheid. Ook hier is het belangrijk om de goede samenwerking tussen mens en exoskelet te behouden. Een laattijdig ingrijpen heeft als gevolg dat het exoskelet een zeer bruuske en oncomfortabele actie moet ondernemen om de mens te corrigeren of dat het zelfs onmogelijk wordt om het evenwicht te behouden. Een exoskelet dat je te veel hindert in je bewegingen, gaat anderzijds al snel irriteren. Daarom voorspelt het exoskelet wanneer de mens dreigt te vallen, en grijpt het enkel dan in. De stabiliteit van de mens is vooral gekenmerkt door de snelheid en positie van zijn lichaam ten opzichte van de voeten. Leun je bijvoorbeeld sterk naar voren, dan is een klein duwtje genoeg om je uit evenwicht te brengen. Naast de beslissing om al dan niet in te grijpen, moet het exoskelet ook bepalen hoe het gaat ingrijpen. Hierbij probeert het exoskelet het evenwicht van de mens te herstellen zoals een mens zonder exoskelet dat zou doen. Indien iemand zijn evenwicht dreigt te verliezen, zal hij bijvoorbeeld sneller een stap zetten dan zich te bukken om zijn stabiliteit te verhogen. Door hiermee rekening te houden werkt het exoskelet de mens niet tegen en voelt ook deze corrigerende actie natuurlijk aan voor de mens.
We kunnen nog een stap verder gaan, door de mens niet alleen te assisteren, maar ook zijn evenwicht te corrigeren. Vandaag krijgen ouderen vaak het advies om te blijven bewegen, maar voorzichtig te zijn en zeker niet te vallen. Een exoskelet dat vallen voorkomt, is in staat om een actief leven te verzoenen met voorzichtigheid. Ook hier is het belangrijk om de goede samenwerking tussen mens en exoskelet te behouden. Een laattijdig ingrijpen heeft als gevolg dat het exoskelet een zeer bruuske en oncomfortabele actie moet ondernemen om de mens te corrigeren of dat het zelfs onmogelijk wordt om het evenwicht te behouden. Een exoskelet dat je te veel hindert in je bewegingen, gaat anderzijds al snel irriteren. Daarom voorspelt het exoskelet wanneer de mens dreigt te vallen, en grijpt het enkel dan in. De stabiliteit van de mens is vooral gekenmerkt door de snelheid en positie van zijn lichaam ten opzichte van de voeten. Leun je bijvoorbeeld sterk naar voren, dan is een klein duwtje genoeg om je uit evenwicht te brengen. Naast de beslissing om al dan niet in te grijpen, moet het exoskelet ook bepalen hoe het gaat ingrijpen. Hierbij probeert het exoskelet het evenwicht van de mens te herstellen zoals een mens zonder exoskelet dat zou doen. Indien iemand zijn evenwicht dreigt te verliezen, zal hij bijvoorbeeld sneller een stap zetten dan zich te bukken om zijn stabiliteit te verhogen. Door hiermee rekening te houden werkt het exoskelet de mens niet tegen en voelt ook deze corrigerende actie natuurlijk aan voor de mens.
Wetenschappelijke principes zijn altijd mooi op papier, maar dienen experimenteel gevalideerd te worden. Jij bent ongetwijfeld geen kandidaat om een ongeteste elektrische broek aan te trekken. Bij dergelijke experimenten is de repeteerbaarheid primordiaal, zodat de situatie met en zonder exoskelet met elkaar te vergelijken zijn. Daarom wordt hier het evenwicht van de proefpersoon steeds op een repeteerbare wijze verstoord met behulp van een slinger die (gedempt!) tegen zijn rug botst. Vervolgens wordt geanalyseerd hoe de proefpersoon hierop reageert. Alvorens te experimenteren is het zeer belangrijk om het exoskelet af te stellen op de proefpersoon. Voor een zwaardere persoon zal het exoskelet immers meer kracht moeten leveren om de persoon in evenwicht te houden. Uit de experimenten blijkt dat het exoskelet de mens zoals gewenst een duwtje in de goede richting geeft wanneer hij zijn evenwicht dreigt te verliezen. De mens heeft zo veel minder moeite met het behouden van zijn evenwicht.
Beeld je in dat je een kind moet leren fietsen. In het begin zal je de fiets van je kind nog permanent vasthouden, maar na verloop van tijd zal het kind meestal alleen fietsen terwijl jij erachteraan loopt. Je zal dan permanent de afweging moeten maken tussen ingrijpen of niet. Te vroeg ingrijpen zal het ongenoegen van je kleine spruit opwekken, terwijl een laattijdig ingrijpen een schram tot gevolg heeft. Het exoskelet gebruikt een vergelijkbare strategie. Ook het exoskelet moet inschatten of de mens in staat zal zijn om zelfstandig zijn evenwicht te behouden. Eenmaal het antwoord hierop nee is, zal het exoskelet overspringen naar een corrigerende modus en de mens volledig terughelpen naar evenwicht, net zoals jij dat doet met het fietsende kind. Deze studie toont het potentieel aan van deze evenwichtsstrategie op basis van experimenten vanuit stilstand. In de toekomst zal deze evenwichtsstrategie uitgebreid worden naar stappen, wandelen, trappen nemen en nog zo veel meer. En wie weet, misschien zal jij daarvan ooit wel eens de vruchten mogen plukken.